可型態變化之無人機
可型態變化之無人機
楊榮程 同學
楊榮程 同學
無人機的多自由度讓它可以在環境中進行更複雜的運動,不過現今大部分的無人機都有固定的型態(通常皆對稱),無法在飛行中改變,另外若在飛行過程中機體損壞,也很有可能造成事故。
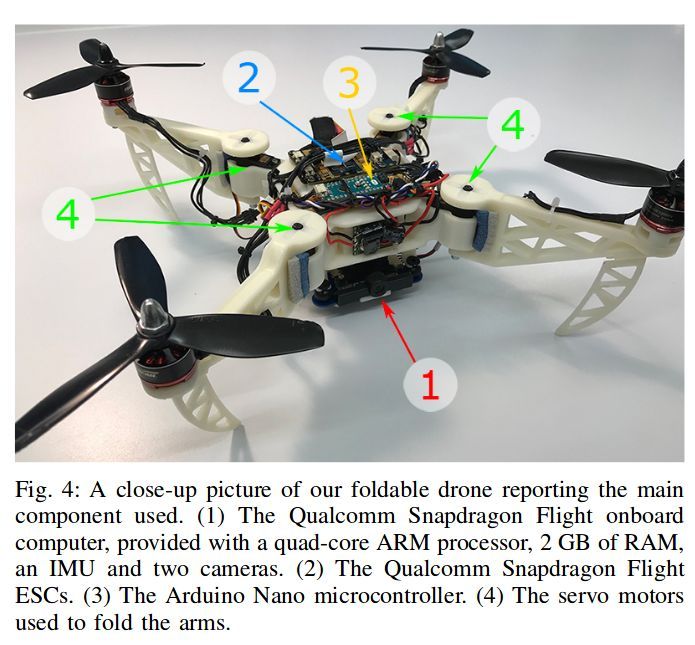
在近期蘇黎世大學發表的研究,無人機可以在飛行過程中,控制軸上的伺服馬達用來變換四種型態,分別為(X, T, H, O),論文中利用適應性控制,將視覺及慣性感測器計算出的位置和姿態誤差,換算成無人機當下需要的推力和扭力,最後得出各個馬達的轉速。從影片中可以看出,當進行任何型態變換時,無人機都可以穩定飛行。此項目主要目的是,在救難或環境複雜的地方,無人機可以改變自身的型態來穿越這種環境,未來在無人機的發展上,應該會看到更多相關的應用。
The Foldable Drone: A Morphing Quadrotor that can Squeeze and Fly
Reference:
D. Falanga, K. Kleber, S. Mintchev, D. Floreano, D. Scaramuzza, "The FoldableDrone: A Morphing Quadrotor that can Squeeze and Fly". IEEE Robotics and Automation Letters (RA-L), 2018.